Project Overview
Objective
Design and implement a comprehensive autonomous robot fleet management system for industrial warehouse operations. The system coordinates multiple robots for material handling, inventory management, and automated logistics using ROS (Robot Operating System) and Open-RMF (Robotics Middleware Framework).
Key Features
Multi-robot coordination, real-time path planning, collision avoidance, task scheduling optimization, fleet monitoring dashboard, integration with warehouse management systems, and automated charging station management for continuous operation.
Results
Successfully deployed a fleet of 6 autonomous robots. Successfull interconectation between two AMR from diferent brands, with different control Softwares (something not possible without the use of Open-RMF).
Technical Specifications
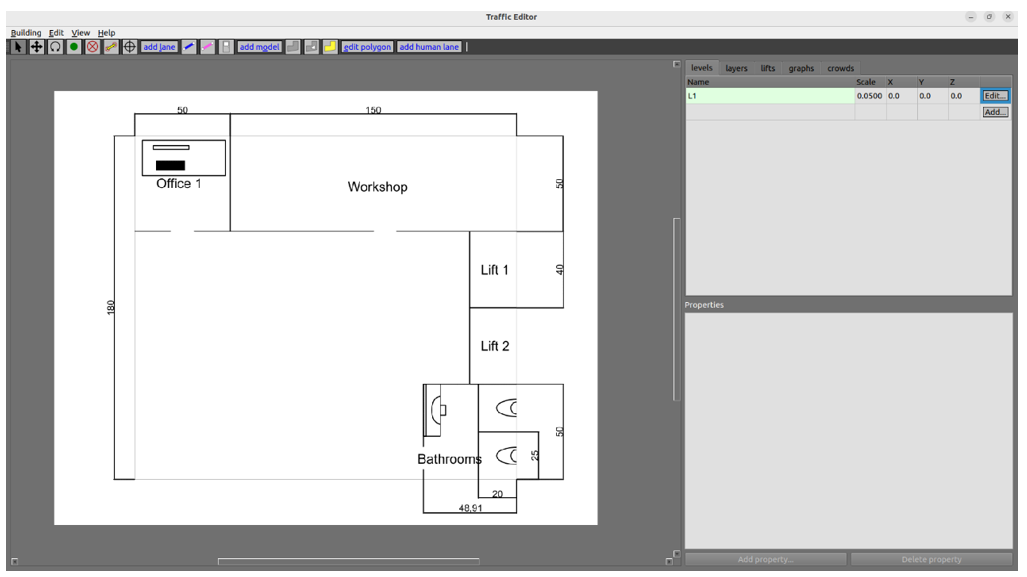
System Architecture
Robot Layer
Individual robot controllers running ROS2 with navigation stack, sensor fusion (LiDAR, cameras, IMU), and local decision-making capabilities. Each robot maintains autonomous operation while communicating with the fleet management system.
Fleet Management
Open-RMF based central coordinator handling task assignment, path planning, traffic management, and resource allocation. Implements advanced algorithms for optimal fleet utilization and conflict resolution.
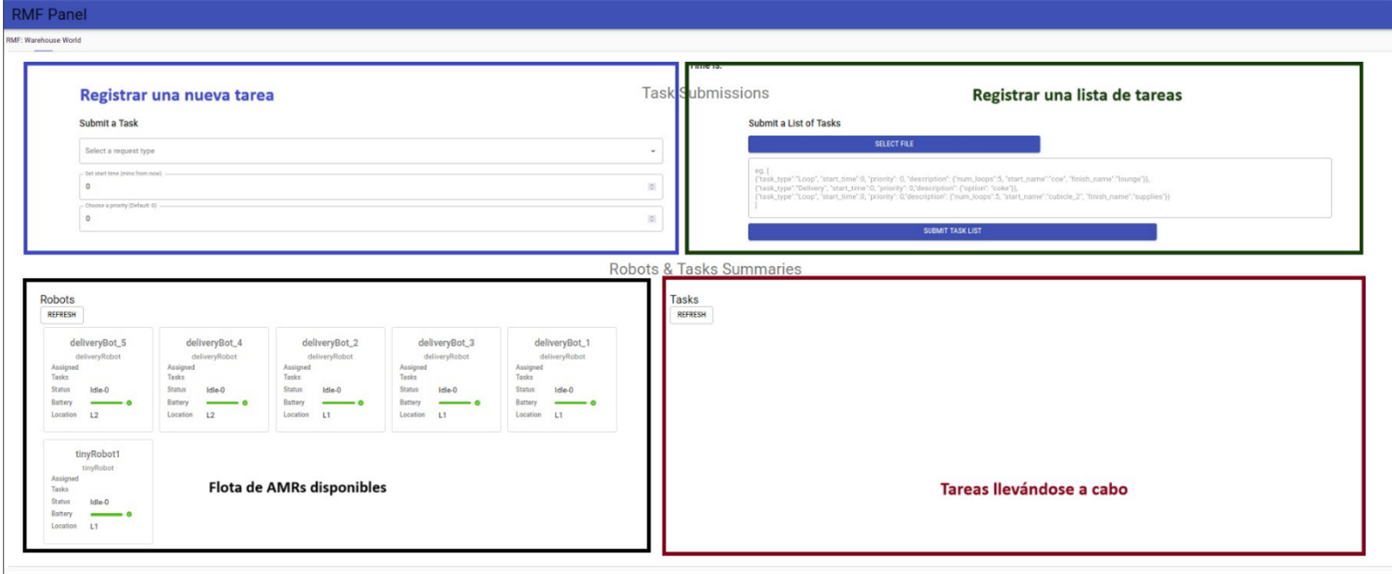
Monitoring System
Real-time dashboard for fleet status monitoring, performance analytics, predictive maintenance alerts, and integration with existing warehouse management systems through RESTful APIs.
Project Timeline
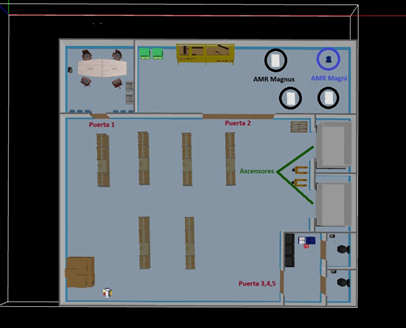
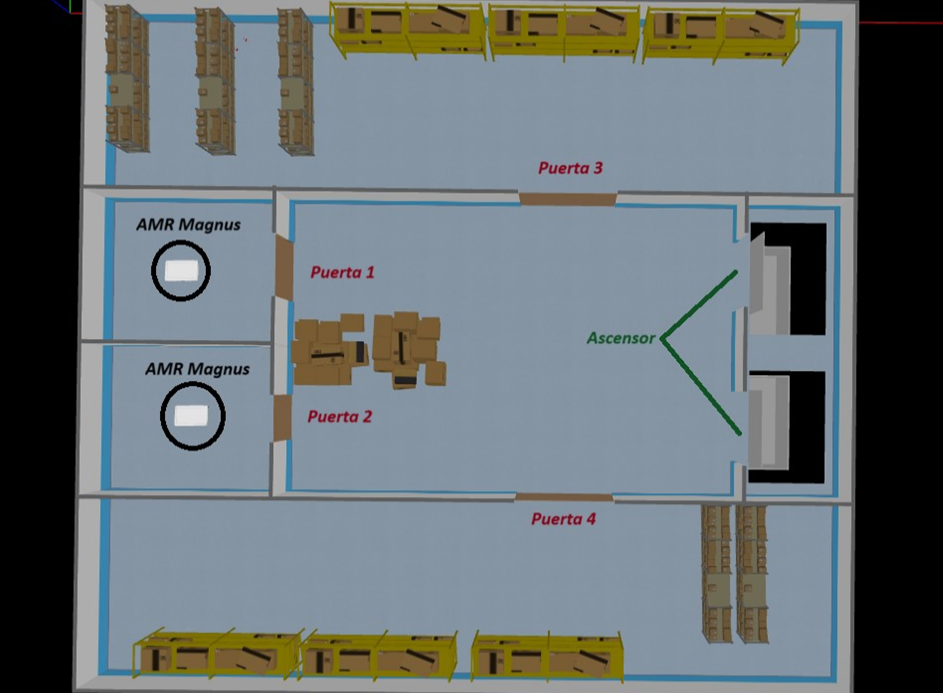
Project Gallery




Project Demo
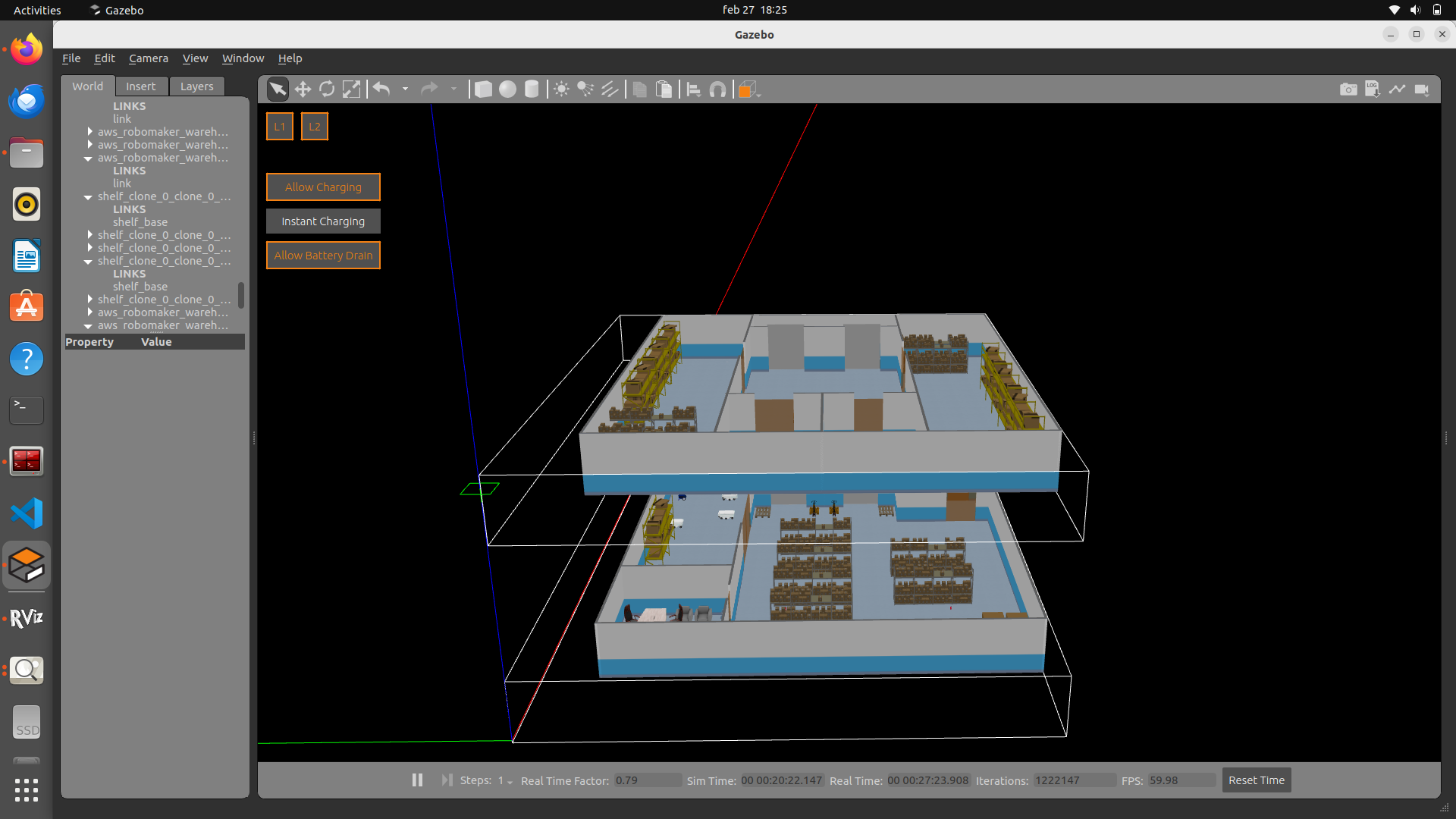
System Demonstration
Complete demonstration of the autonomous robot fleet management system in action, showing multi-robot coordination, path planning, and real-time monitoring capabilities.
Technologies & Tools
Robotics Framework
ROS2 Humble, Open-RMF, Nav2 Navigation Stack, Gazebo Simulation, RViz Visualization, MoveIt Motion Planning, and custom ROS2 packages for fleet coordination.
Programming Languages
C++ for real-time robot control and performance-critical components, Python for system integration and web interfaces, JavaScript/React for dashboard frontend.
Infrastructure
Docker containerization, PostgreSQL database, Redis for caching, nginx for web serving, and AWS cloud infrastructure for data analytics and remote monitoring.